

- Moin heute mal Schritt für Schritt wie man sich TeslaUSB einrichtet:
- Die nächsten Schritte direkt mit der SD Karte im Rechner (z.B. mit USB Adapter)
- Nun weiter auf dem PI selber
- RSYNC Spezialitäten
- RCLONE - NextCloud Spezialitäten
- WIFI Probleme
- Troubleshooting
- Die wichtigsten Skripte erklärt
- GPIO Breakout
Moin heute mal Schritt für Schritt wie man sich TeslaUSB einrichtet:
Ich hatte ja schon mal unter Autoupload Tesla Dashcam mit Raspi Zero W erklärt, dass es eine Möglichkeit ghibt eine Raspberry PI als Dashcam Speicher zu nutzer der dann automatisiert die Clips auf Euren Heimserver hochlädt. Hier nun die Schritt für Schritt Anleitung.
Vorraussetzungen:
- RaspiPi Zero, wegen Stromververbrauch und USB Karten similution. PI4 geht auch der wird dann USB-C angeschlossen - deutlich schnellere Übertragung aber auch Faktoren höherer Stromverbrauch/Wärmeentwicklung. Aber ansonsten von der Konfig her hier komplett dasselbe.
- SD Karte: Ich habe jetzt eine 512GB SD genommen damit etwas mehr als nur ein Tag gespeicher werden kann
- SD Karten Adapter um diese im Rechner bearbeiten zu können
- Etcher oder ähnliche SW um das Image auf eine SD Karte zu bringen
- WLAN daheim oder HotSpot im Auto - Vorsicht Datenmengen können in Terrabytes gehen
- Man muss Basiswissen auf der Shell haben bisserl Linuxkenntnisse
- ASCII Editor z.B. Notepad++
Nun zum Vorgehen:
Die nächsten Schritte direkt mit der SD Karte im Rechner (z.B. mit USB Adapter)
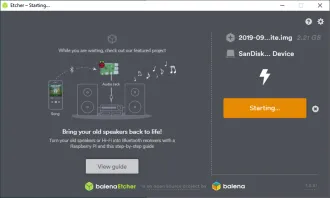
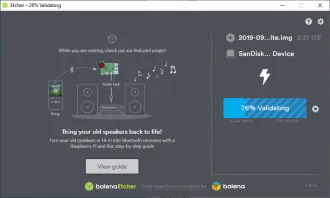
Als erstes das aktuelle Image herunterladen. AKtueller Stand 2.0 Beta: https://github.com/marcone/teslausb/releases/tag/v2.0-beta. Die zip Datei entpacken und dann dieses mt Etcher oder ähnlichen Tools auf die SD Karte bringen.
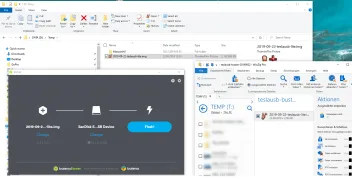
Image auf die SD Karte bringen (mit Etcher)
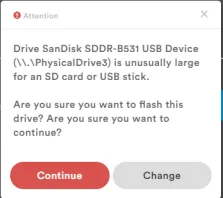
512GB sind groß ja, aber weiter machen...
Die SD Karte nun kurz aus dem Slot nehmen und wieder einsetzen. Es erscheint ein BOOT Laufwerk. Nun muss man dort die Datei teslausb_setup_variables.conf erstellen. Dazu die sample kopieren und umbenennen (das .sample entfernen, das kann man unter windows machen) und den Inhalt so ändern, dass er zu den eigenen Bedürfnissen passt. Um sicher zu sein, dass Ihr immer die neueste sample Datei habt könnt Ihr diese auch unter https://github.com/marcone/teslau…les.conf.sample herunterladen. Solange Ihr immer das neueste Release nutzt sollte diese kompatibel sein.

Editieren der conf datei mit z.b. Notepad++
Das Konfigfile ist eigentlich in der Datei gut kommentiert - lest die Datei einfach mal durch. Meine Änderungen sind z.B.
# Change this! The setup script will not accept the default 'password'
export TESLAUSB_HOSTNAME=teslausbm3
export INCREASE_ROOT_SIZE=2G
export timezone="Europe/Berlin"
export archivedelay=60Auch verwende ich kein CIFS (windows samba shares) sondern SSH zum übertragen der dashcam Dateien. Paar Kommentare zur Konfig:
- Ich habe aktuell das WIFI vom RASPI mit Absicht aus um keine Sicherheitslücken zu erzeugen.
- Den Hostnamen etwas gekürzt
- Die Rootpartitaion auf 2G vergrößert falls ich später noch SW nachinstallieren möchte
- Die Tesla account daten hinterlege ich NICHT, da Sicherheit und ich keine weitere (Fehler)Quelle, die das Auto alive hält
- Zeitzone angepasst
- Delay bis der Raspi mit der Synchonisierung startet auf 60s erhöht
Bzgl. Dateiübertragung und den exportwerten hier mal die Links auf die wichtigsten Dokumentationen:
- Windows Samba / CIFS (nutze ich aus Sicherheitsgründen nicht {meine Windows-Share-Server sind nicht via WLAN erreichbar})
- SSH / RSYNC (der Schlüssel-Austausch und die Berechtigungen sind der schwierigste Teil hat mich "Tage" gekostet um das auf Windows hinzubekommen - bitte lest die Anleitung vor allem bzgl. Keyaustausch)
- DropBox und Co mit RClone
als Beispiel mal meine RSYNC setting (SAMBA/CIFS ist als Beispiel ja in der original Datei):
export ARCHIVE_SYSTEM=rsync
export RSYNC_USER=teslacam
export RSYNC_SERVER=192.168.y.x
export RSYNC_PATH=/cygdrive/d/IPCams/TeslaCam192.168.y.x ist mein windows client mit einem SSH server. D:\\.... der lokale Pfad zur Dateiablage (im meinen Fall des windows SSH servers muss ich die Cygwin Nomenklatur verwenden) und teslacam der windows/ssh user der dort schreiben darf. Ein passwort braucht man nicht, da die Authentifizierung über SSH-Keys läuft (sobald mal eingerichtet). Ist der Windowsrechner nicht mit ping erreichpar muss archive-is-reachable.sh angepasst werden (auf einen ping erreichbaren Rechner) damit der PI weiss er darf mit der Übertragung loslegen.
Nun weiter auf dem PI selber
Sind alle Parameter gespeichert, die SD Karte in den PI stecken und booten.

Das USB zu USB Kabel nicht in den Powerslot einstecken!
Strom bekommt der Zero auch vom USB port.
Je nach Größe der SD rödelt der PI dann ca. 2-10min - zu erkennen am Dauerleuchten der LED des PIs. Wenn man sich dann via WIFI und dem user pi password raspberry einloggt und sudo parted aufruft und dann print list all eingibt, sollte so etwas rauskommen:
pi@teslausbm3:~ $ sudo parted
GNU Parted 3.2
Using /dev/mmcblk0
Welcome to GNU Parted! Type 'help' to view a list of commands.
(parted) print list all
Model: SD SN512 (sd/mmc)
Disk /dev/mmcblk0: 512GB
Sector size (logical/physical): 512B/512B
Partition Table: msdos
Disk Flags:
Number Start End Size Type File system Flags
1 4194kB 273MB 268MB primary fat32 lba
2 277MB 4362MB 4085MB primary ext4
3 4362MB 512GB 507GB primary xfs
4 512GB 512GB 105MB primary ext4mount ergibt eine deutlich längere Liste - dies nur zum Vergleich/troubleshooten - Ihr müsst das nicht aufrufen. die mmcblk0p1,3 & 4 sollten aber da sein, ansonsten ist was schiefgelaufen.
pi@teslausbm3:~ $ mount
/dev/mmcblk0p2 on / type ext4 (ro,noatime)
devtmpfs on /dev type devtmpfs (rw,relatime,size=217212k,nr_inodes=54303,mode=755)
sysfs on /sys type sysfs (rw,nosuid,nodev,noexec,relatime)
proc on /proc type proc (rw,relatime)
tmpfs on /dev/shm type tmpfs (rw,nosuid,nodev)
devpts on /dev/pts type devpts (rw,nosuid,noexec,relatime,gid=5,mode=620,ptmxmode=000)
tmpfs on /run type tmpfs (rw,nosuid,nodev,mode=755)
tmpfs on /run/lock type tmpfs (rw,nosuid,nodev,noexec,relatime,size=5120k)
tmpfs on /sys/fs/cgroup type tmpfs (ro,nosuid,nodev,noexec,mode=755)
cgroup2 on /sys/fs/cgroup/unified type cgroup2 (rw,nosuid,nodev,noexec,relatime,nsdelegate)
cgroup on /sys/fs/cgroup/systemd type cgroup (rw,nosuid,nodev,noexec,relatime,xattr,name=systemd)
cgroup on /sys/fs/cgroup/blkio type cgroup (rw,nosuid,nodev,noexec,relatime,blkio)
cgroup on /sys/fs/cgroup/net_cls type cgroup (rw,nosuid,nodev,noexec,relatime,net_cls)
cgroup on /sys/fs/cgroup/cpu,cpuacct type cgroup (rw,nosuid,nodev,noexec,relatime,cpu,cpuacct)
cgroup on /sys/fs/cgroup/freezer type cgroup (rw,nosuid,nodev,noexec,relatime,freezer)
cgroup on /sys/fs/cgroup/memory type cgroup (rw,nosuid,nodev,noexec,relatime,memory)
cgroup on /sys/fs/cgroup/devices type cgroup (rw,nosuid,nodev,noexec,relatime,devices)
systemd-1 on /proc/sys/fs/binfmt_misc type autofs (rw,relatime,fd=34,pgrp=1,timeout=0,minproto=5,maxproto=5,direct)
sunrpc on /run/rpc_pipefs type rpc_pipefs (rw,relatime)
debugfs on /sys/kernel/debug type debugfs (rw,relatime)
mqueue on /dev/mqueue type mqueue (rw,relatime)
configfs on /sys/kernel/config type configfs (rw,relatime)
tmpfs on /var/log type tmpfs (rw,nosuid,nodev,relatime)
tmpfs on /var/tmp type tmpfs (rw,nosuid,nodev,relatime)
tmpfs on /tmp type tmpfs (rw,nosuid,nodev,relatime)
/dev/mmcblk0p4 on /mutable type ext4 (rw,relatime)
/dev/mmcblk0p1 on /boot type vfat (ro,relatime,fmask=0022,dmask=0022,codepage=437,iocharset=ascii,shortname=mixed,er rors=remount-ro)
/dev/mmcblk0p3 on /backingfiles type xfs (rw,noatime,attr2,inode64,noquota)
/dev/loop0p1 on /backingfiles/snapshots/snap-000000/mnt type vfat (ro,relatime,fmask=0022,dmask=0022,codepage=437,io charset=ascii,shortname=mixed,errors=remount-ro)
tmpfs on /run/user/1000 type tmpfs (rw,nosuid,nodev,relatime,size=44308k,mode=700,uid=1000,gid=1000)Der Pi sollte noch immer mit Herzschlag blinken. dann kann man jetzt rebooten. Auf der shell sudo reboot aufrufen - oder notfalls PI ziehen und nach 10s wieder in den USB Port stecken. Nach dem reboot solltet Ihr am PC (ca. 2min) ein USB drive namens CAM und MUSIC (wenn ihr den Music bereich eingerichtet habt) sehen. USB 2-3 Meldungen dazwischen ignorieren, die kommen von der bootphase des PIs. Auf dem CAM drive sollte noch ein Verzeichnis mit dem Namen TeslaCam sein damit es im Aut o funktioniert und erkannt wird.
![]()
hier nochmals meine komplette konfig:
export ARCHIVE_SYSTEM=rsync
export RSYNC_USER=teslacam
export RSYNC_SERVER=192.168.x.y
export RSYNC_PATH=/cygdrive/d/IPCams/TeslaCam
export camsize=90%
export SSID='SSID'
export WIFIPASS='PWD'
export HEADLESS_SETUP=true
export TESLAUSB_HOSTNAME=teslausbm3
export INCREASE_ROOT_SIZE=2G
export timezone="Europe/Berlin"
export archivedelay=60RSYNC Spezialitäten
Falls Ihr SSH basierten Sync nutzt. Loggt Euch vom PI in Euren Storagerserver ein (als root) und vice versa (mit SSH) um zu prüfen ob der keys des PIs bekannt ist (kann er eigentlich nicht).
pi@teslausbm3:~ $ sudo -i
root@teslausbm3:~ $ /root/bin/remountfs_rw
Remounting / as read/write
Remounting /boot as read/write
Done. Make any changes needed, and reboot the Pi when ready.
Filesystems / and /boot will be mounted as read only after reboot.
root@teslausbm3:~ $ ssh [email protected]
The authenticity of host '192.168.x.y (192.168.x.y)' can't be established.
ECDSA key fingerprint is SHA256:GIUZSGFIUDFSGITFDSDGI.
Are you sure you want to continue connecting (yes/no)? yes
Warning: Permanently added '192.168.x.y' (ECDSA) to the list of known hosts.
[email protected]'s password:So also nicht - wenn hier das Passwort abgefragt wird wird das ganze nicht funktionieren.
also auf dem PI als root (also nach sudo -i) folgedes aufrufen:
root@teslausbm3:~ $ ssh-keygen -b 4096
Generating public/private rsa key pair.
Enter file in which to save the key (/root/.ssh/id_rsa):
Enter passphrase (empty for no passphrase):
Enter same passphrase again:
Your identification has been saved in /root/.ssh/id_rsa.
Your public key has been saved in /root/.ssh/id_rsa.pub.
The key fingerprint is:
SHA256:nOs0m/HQ3dEMUjpcTbc4r/fghdfghfh root@teslausbm3
The key's randomart image is:
+---[RSA 4096]----+
| ooo|
| . .. +. +|
| + . o o=o.. |
| . =.+.o ooo+ |
| asdfsdf ...o|
| E.oo...o. |
| +Bo. .o. |
| .+*B o |
| ..o+ ...o. |
+----[SHA256]-----+der Inhalt der Datei .ssh/id_rsa.pub muss jetzt in die Datei authorized_keys auf dem SSH Server (im Verzeichnis .ssh des Benutzers der aufgerufen wird).

Nicht vergessen - Berechtigung und owner der Datei darf nur der SSH nutzer (hier teslacam) und SYSTEM selber sein (falls Ihr die Datei unter einem anderen Nutzeraccount bearbeitet). Danach nochmals vom PI aus ssh -l loginname ipadresse aufrufen und bestätigen, dass der host in die known_host liste eingetragen wird. Ansonsten wird die automatische Verbindungsaufnahme immer noch scheitern.
BTW die config landet final im root user verzeichnis
root@teslausbm3:~# cat .teslaCamRsyncConfig
user=teslacam
server=192.168.x.y
path=/cygdrive/d/IPCams/TeslaCamKontrolliert die Datei aber bitte - Windows und backslash contra Linux ist manchmal etwas schwierig, bzw. in meinem Fall als Cygdrive umnzusetzen. That's it - Installation done - Have fun
Ah ein Tipp noch wenn Ihr mit rsync arbeitet und evtl. alles außer den recentFile syncen wollt und die Verzeichnisstruktur auch erhalten belieben soll setzt das
rsync -auvh --timeout=60 --remove-source-files --no-perms --stats --log-file=/tmp/archive-rsync-cmd.log --exclude 'RecentClip*' $CAM_MOUNT/TeslaCam/* $user@$server:$pathin die Datei /root/bin/archive-clips.sh statt den einzelnen Verzeichnissen ein.
RCLONE - NextCloud Spezialitäten
Unter https://github.com/cimryan/teslau…/SetupRClone.md ist beschrieben wie Ihr rclone mit TeslaUSB bei der Initialen Konfig konfiguriert. Es geht aber natürlich auch später wenn man sich umentscheided (von Samba ... wechselt):
Falls noch nicht installiert müsst Ihr rclone installieren dazu
Schritt 1: rclone basic Installation und Konfiguration
aufrufen. Dann geht es weiter mit der config in meinem Fall für Nextcloud. Da dies unabhängig von TeslaUSB ist kommt dazu ein extra Artikel. Hier nun die Konfiguration, die man für TeslaUSB vornehmen muss.
Die Basis Scripts für rclone Benutzung finden sich unter https://github.com/marcone/teslau…rclone_archive:
Rclone scripts für teslausb auf github
aber nun Schritt für Schritt davon ausgehend, dass die teslausb setup scripte schon mal durchgelaufen sind und man rclone (mit nextcloud) eingerichtet hat.
Schritt 2: Variablen setzen
auf der shell des teslausbs im root Benutzerverzeichnis die teslaCamRcloneConfig Datei erstellen - oder modifizieren (siehe unten) wenn Sie schon existiert. Editieren unter Linux shell meist mit vi - der vi ist etwas komplizierter zu erklären, deswegen hier ein Link auf eine Kurzreferenz.
wenn IHr die Datei mit vi geöffnet habt in den Insert mode wechseln (i drücken) und die folgenden zwei Zeilen reinpasten:
$drive ist Euer remote nextcloud speicher den Ihr in Schritt eins mit rclone konfiguriert habt und $path das dortige Ablageverzeichnis (die Werte müsste Ihr natürlich für Eure Nextcloud entsprechend anpassen).
Mit ESC wieder in den Kommandomodes und mit :w! abspeichern. Wenn Euch etwas missglückt ist kann man den vi im Kommandomodus via :q! ohne speichern verlassen. x löscht ein Zeichen und dd die ganze Zeile...
Den Inhalt der Datei (wie sie denn aussehen sollte) seht Ihr in der cat Ausgabe.
root@teslausb4:~# cat .teslaCamRcloneConfig
export drive=privatecloud
export path=Cameras/TeslaCamSchritt : Backup der Skripte und neue von github herunterladen
Jetzt ins bin Verzeichnis wechseln und Eure "alte" scripts Dateien sichern:
und die rclone version mit curl herunterladen und mit dem executable bit (+x) versehen.
Anmerkung: curl lädt die Dateien der URL (github) herunter und -o leitet das dann in die lokale Datei um.
curl https://raw.githubusercontent.com/marcone/teslausb/main-dev/run/rclone_archive/archive-clips.sh -o archive-clips.sh;
curl https://raw.githubusercontent.com/marcone/teslausb/main-dev/run/rclone_archive/connect-archive.sh -o connect-archive.sh;
curl https://raw.githubusercontent.com/marcone/teslausb/main-dev/run/rclone_archive/disconnect-archive.sh -o disconnect-archive.sh;
curl https://raw.githubusercontent.com/marcone/teslausb/main-dev/run/rclone_archive/archive-is-reachable.sh -o archive-is-reachable.sh;
curl https://raw.githubusercontent.com/marcone/teslausb/main-dev/run/rclone_archive/write-archive-configs-to.sh -o write-archive-configs-to.sh;
curl https://raw.githubusercontent.com/marcone/teslausb/main-dev/run/rclone_archive/verify-and-configure-archive.sh -o verify-and-configure-archive.sh;
chmod +x *.sh;Das war's dann eigentlich auch schon.
Anmerkung: Die Skripte müssen nur da sein (im bin Verzeichnis mit +x versehen), da ist nichts dran zu editeren und Ihr müsst diese auch nicht manuell aufrufen (das macht teslausb automatisch).
Ihr könntet höchstens statt dem Google DNS server (8.8.8.8) Eure nextcloud IP in archive-is-reachable.sh eintragen - das schadet zumindest nicht und die Übertragung wird nur gestartet, wenn Euer Server wirklich erreichbar ist. Man kann natürlich auch den DNS Namen statt der IP Adresse nehmen - speziell wenn man eine dynamische IP Adresse nutzt.
Wenn Ihr jetzt die Funkion testen wollt, einfach die IP adresse in archive-is-reachable.sh ändern, so dass die IP nicht mehr erreichbar ist (simuliert ein herausfahren aus dem WLAN) im /mutable/archiveloop.log steht dann nach ein paar Sekunden "Waiting for archive to be reachable". Dann wieder die korrekte IP eintragen und es müsste ein rclone Sycn (oder eher move) angeworfen werden.
Sat 4 Jan 12:40:57 CET 2020: Retrying...
Sat 4 Jan 12:40:57 CET 2020: Sleeping before retry...
Sat 4 Jan 12:40:58 CET 2020: Retrying...
Sat 4 Jan 12:40:58 CET 2020: Attempts exhausted.
Sat 4 Jan 12:40:58 CET 2020: Archive is unreachable.
Sat 4 Jan 12:40:58 CET 2020: Waiting for archive to be reachable...
hier habe ich die korrekte IP wieder eingetragen
Sat 4 Jan 12:43:28 CET 2020: Archive is reachable.
Sat 4 Jan 12:43:28 CET 2020: Waiting for time to be set by ntpd...
Sat 4 Jan 12:43:50 CET 2020: Time still not set, attempting to force it
Sat 4 Jan 12:44:10 CET 2020: Failed to set time
Sat 4 Jan 12:45:10 CET 2020: Disconnecting usb from host...
Sat 4 Jan 12:45:10 CET 2020: Disconnected usb from host.
Sat 4 Jan 12:45:10 CET 2020: Running fsck on /backingfiles/cam_disk.bin...
Sat 4 Jan 12:45:10 CET 2020: | fsck from util-linux 2.33.1
Sat 4 Jan 12:45:12 CET 2020: | fsck.fat 4.1 (2017-01-24)
Sat 4 Jan 12:45:12 CET 2020: | /dev/loop0p1: 240 files, 172512/13954347 clusters
Sat 4 Jan 12:45:12 CET 2020: Finished fsck on /backingfiles/cam_disk.bin.
Sat 4 Jan 12:45:12 CET 2020: Running fsck on /backingfiles/music_disk.bin...
Sat 4 Jan 12:45:12 CET 2020: | fsck from util-linux 2.33.1
Sat 4 Jan 12:45:12 CET 2020: | fsck.fat 4.1 (2017-01-24)
Sat 4 Jan 12:45:12 CET 2020: | /dev/loop0p1: 4 files, 4/1213389 clusters
Sat 4 Jan 12:45:12 CET 2020: Finished fsck on /backingfiles/music_disk.bin.
Sat 4 Jan 12:45:12 CET 2020: Archiving...
Sat 4 Jan 12:45:12 CET 2020: Checking saved folder count...
Sat 4 Jan 12:45:12 CET 2020: Ensuring cam file is mounted...
Sat 4 Jan 12:45:13 CET 2020: Mounting /mnt/cam...
Sat 4 Jan 12:45:13 CET 2020: Mounted /mnt/cam.
Sat 4 Jan 12:45:13 CET 2020: Ensured cam file is mounted.
Sat 4 Jan 12:45:15 CET 2020: There are 1 event folder(s) with 36 file(s) to move.
Sat 4 Jan 12:45:15 CET 2020: Starting recording archiving: 1 event folder(s) with 36 file(s)
Sat 4 Jan 13:04:18 CET 2020: Moving clips to rclone archive...
Sat 4 Jan 13:06:28 CET 2020: Moved 36 file(s).
Sat 4 Jan 12:45:15 CET 2020: Trimming free space in /mnt/cam, which has 443 extents
Sat 4 Jan 12:45:16 CET 2020: Trim complete, image now has 443 extents
Sat 4 Jan 12:45:16 CET 2020: Unmounting /mnt/cam...
Sat 4 Jan 12:45:16 CET 2020: Unmounted /mnt/cam.
Sat 4 Jan 12:45:16 CET 2020: Finished archiving.Nicht über den Zeitstempel der rclone Zeilen wundern - hatte erst das x bit vergessen (siehe oben chmod), da tat sich dann nat. nix.
Nachtrag Musicdatei syncronisierung
#!/bin/bash -eu
log "Sync music archive..."
source /root/.teslaCamRcloneConfig
if [ -d "/mnt/music" ]
then
rclone --config /root/.config/rclone/rclone.conf sync "$drive:$mpath" "/mnt/music" >> "$LOG_FILE" 2>&1 || echo ""
log "Music files synched."
fi
log "Finished copying files from rclone archive"Obiges in die Datei /root/bin/copy-music.sh einfügen (mit vi :(). chmod +x i /root/bin/copy-music.sh nicht vergessen.
Last but not least noch eine Variable in der rcloneconfig hinzufügen (mpath):
root@teslausb4:~/bin# cat ../.teslaCamRcloneConfig
export drive=privatecloud
export path=Cameras/TeslaCam
export mpath=Musicmpath zeigt auf den Musik-Folder in Eurer Nextcloud und zu guter letzt mkdir /mnt/musicarchive (das Verzeichnis wird auf vorhandesein geprüft warum auch immer).
WIFI Probleme
Kontrolliert /etc/wpa_supplicant/wpa_supplicant.conf wenn da das falsche PWD oder SSID drin steht korrigieren. Auch das LAND sollte angepasst werden (steht evtl. auf US, bei uns ist DE richtig). Das könnte speziell beim R4 relevant sein (5GHz Wifi).
Troubleshooting
Wenn der Pi läuft findet mal die logs unter
/tmp/archive-rsync-cmd.log
/mutable/archiveloop.log
Um den Pi ohne komplettes neu setup zu aktualisieren (also ich meine den TeslaUSB Anteil) folgendes aufrufen:
sudo -i
/root/bin/remountfs_rw
/root/bin/setup-teslausb selfupdate
/root/bin/setup-teslausb
rebootWenn Ihr an den Scripts gebastelt habt, müsst Ihr diese Änderungen danach wieder einfügen.
Weitere Tipps findet Ihr unter: https://github.com/marcone/teslau…troubleshooting
Die wichtigsten Skripte erklärt
Hier mal eine kurze übersicht was denn teslausb so an skripten nutzt (nach der Installation):
root@teslausb4:~/bin# ls -lart /root/bin
total 108
-rwxr-xr-x 1 root root 90 Feb 14 2019 archive-is-reachable.sh
-rwxr-xr-x 1 root root 1562 Sep 22 23:51 enable_wifi.sh
-rwxr-xr-x 1 root root 16469 Sep 22 23:55 setup-teslausb
-rwxr-xr-x 1 root root 4484 Dec 22 12:58 make_snapshot.sh
-rwxr-xr-x 1 root root 805 Dec 22 12:58 mount_snapshot.sh
-rwxr-xr-x 1 root root 513 Dec 22 12:58 mount_image.sh
-rwxr-xr-x 1 root root 661 Dec 22 12:58 release_snapshot.sh
-rwxr-xr-x 1 root root 517 Dec 22 12:58 force_sync.sh
-rwxr-xr-x 1 root root 1336 Dec 22 12:59 send-push-message
-rwxr-xr-x 1 root root 602 Dec 22 12:59 send_sns.py
-rwxr-xr-x 1 root root 11627 Dec 22 12:59 archiveloop
-rwxr-xr-x 1 root root 1571 Dec 22 12:59 waitforidle
-rwxr-xr-x 1 root root 276 Dec 22 12:59 remountfs_rw
-rwxr-xr-x 1 root root 33 Dec 22 12:59 connect-archive.sh
-rwxr-xr-x 1 root root 33 Dec 22 12:59 disconnect-archive.sh
-rwxr-xr-x 1 root root 156 Dec 22 12:59 write-archive-configs-to.sh
-rwxr-xr-x 1 root root 650 Dec 22 17:08 archive-clips.sh_bak
-rwxr-xr-x 1 root root 629 Dec 22 17:36 archive-clips.sh- archive-is-reachable.sh: Hier steht der Server drin, der zum prüfen der Erreichbarkeit Eures sychronisationsspeichers verwendet wird. Das ist meist derselbe server kann aber auch mal zum Beispiel der WLAN Router selber sein.
- achive-loop.sh: Hauptprogrammschleife die quasi permanent läuft und andere Skripte aufruft
- archive-clips.sh: Hier müsst Ihr eingreifen wenn Ihr den Sync-process selber anpassen wollt. Ich habe hier z.b. das RSYNC so angepasst, dass es meinen Bedürfnissen entsprcht.
GPIO Breakout

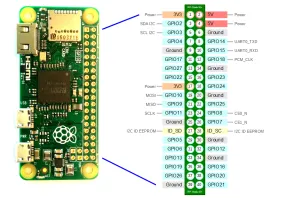
PI4 und PI0 GPIO Belegung
Kommentare 7
Neu erstellte Kommentare unterliegen der Moderation und werden erst sichtbar, wenn sie durch einen Moderator geprüft und freigeschaltet wurden.
Neu erstellte Kommentare unterliegen der Moderation und werden erst sichtbar, wenn sie durch einen Moderator geprüft und freigeschaltet wurden.